We’re happy to announce that videos and speakers’ slides from ROSCon 2014 have been posted, and are linked from the program page.
The videos can also be browsed here
Enjoy!

We’re happy to announce that videos and speakers’ slides from ROSCon 2014 have been posted, and are linked from the program page.
The videos can also be browsed here
Enjoy!
 OSRF is pleased to welcome Jackie Kay as a software engineer! Jackie has dreamed of open source robots taking over the world since 2011, when she assisted Prof. Matt Zucker with developing the curriculum for a ROS-based robotics course at Swarthmore College. She has also completed research at the Carnegie Mellon Robotics Institute in autonomous path planning for lunar rovers, mentored by Kevin Peterson at Astrobotic. She graduated Swarthmore in May and spent the summer as an intern at OSRF developing demos and tools for the Baxter Research Robot donated to us by Rethink Robotics. (You can view her work on GitHub.) She is excited to upgrade from intern to fully-fledged software engineer, and hopes this means the company will finally approve her plans for a fully automated beer delivery system using Baxter and a fleet of Turtlebots.
OSRF is pleased to welcome Jackie Kay as a software engineer! Jackie has dreamed of open source robots taking over the world since 2011, when she assisted Prof. Matt Zucker with developing the curriculum for a ROS-based robotics course at Swarthmore College. She has also completed research at the Carnegie Mellon Robotics Institute in autonomous path planning for lunar rovers, mentored by Kevin Peterson at Astrobotic. She graduated Swarthmore in May and spent the summer as an intern at OSRF developing demos and tools for the Baxter Research Robot donated to us by Rethink Robotics. (You can view her work on GitHub.) She is excited to upgrade from intern to fully-fledged software engineer, and hopes this means the company will finally approve her plans for a fully automated beer delivery system using Baxter and a fleet of Turtlebots.
Jackie graduated Swarthmore College in May 2014 with a major in Computer Science and minors in Mathematics and Engineering. At Swarthmore, she worked with Professor Matt Zucker in developing tools for robotics education and TA’d students in fundamental robotics concepts as well as controlling Turtlebots in ROS. Under the guidance of Kevin Peterson and Red Whittaker at Carnegie Mellon University, she developed a simulation framework for, and published research on, autonomous path planning for lunar rovers. As a summer intern at OSRF, she created a suite of demos and tools for the Baxter Research Robot from Rethink Robotics. She joined the team full-time in September 2014.
Thanks to everyone for another fantastic ROSCon! It was a fun event, filled with great presentations and discussions, plus many of those, “we’ve Internet-known each other for years, but are now meeting for the first time,” moments. We’ll post the videos and slides as soon as we can, linking them from the program page.
Here’s the group at the end of the event (thanks to Chad Rockey for being our photographer):
And here’s one way to break down the demographics of the attendees, based on their type of affiliation: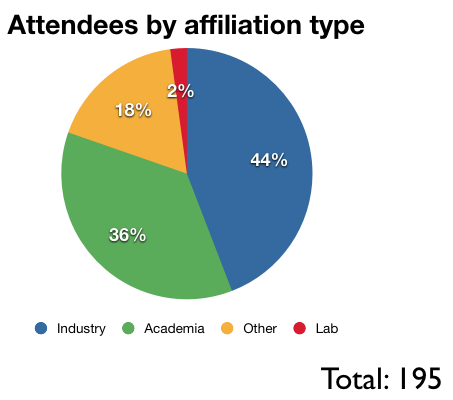
We’d like to thank our generous sponsors, especially: Qualcomm, Clearpath Robotics, Rethink Robotics, and Cruise Automation.
Our friends at RightHand Robotics recently posted more information on how they worked with OSRF and ROS to develop their new ReFlex Hand. We’d like to highlight the fact that OSRF’s contribution to the project, which included the controller board electronics, its firmware, and the low-level host-side driver software, is all available under an open source license, in the reflex-ros-pkg repository.
Thanks to Morgan and Gabby for their great work on the project!
To learn more, dive into the code, take a look at the video below, or check out their blog post.
Roboticists Now Able to Incorporate System-On-A-Chip Capabilities in Robot Designs and Applications
September 12, 2014 — MOUNTAIN VIEW, CA — Open Source Robotics Foundation (OSRF) today announced plans to extend the capabilities of ROS to Qualcomm ® Snapdragon™ 600 processors, a product of Qualcomm Technologies, Inc. (QTI), a wholly-owned subsidiary of Qualcomm Incorporated. Today’s announcement is made in conjunction with ROSCon 2014, the annual ROS Developer Conference. ROSCon runs from Sept. 12-13 in Chicago, IL. More information on the event is at http://roscon.ros.org/2014/
Via this agreement, OSRF will create and subsequently support a ROS release for Qualcomm Snapdragon 600 processors for both the Linux and Android operating systems. OSRF will test, refine, and fully integrate support for the ARM instruction set architecture into ROS development efforts. Once complete, OSRF will perform ongoing maintenance to generally support ROS on Qualcomm Snapdragon 600 processors.
The benefit to the worldwide robotics community working on the lower-power ARM chips means that robots can be smaller, more efficient, and have a longer battery life.
“As adoption of ROS continues to increase, our developer community wants to incorporate the latest computing platforms,” says Brian Gerkey, CEO of OSRF. “Given the intersection between robotics and mobile and embedded systems, we believe that offering Snapdragon’s SoC capabilities to our users will be a big hit.”
“Qualcomm Technologies is proud to join OSRF and the ROS community to create an official, supported release for Qualcomm Snapdragon 600 processors,” said Matt Grob, executive vice president and CTO, Qualcomm. “We’re excited about the potential for future innovation and invention in the robotics community with the combination of ROS and Qualcomm Snapdragon processors.”
ROS (for “Robot Operating System”) is a collection of tools and libraries that simplify the task of creating and programming robotic platforms and applications. ROS is overseen by OSRF, who make the OS freely available to any and all users via open source licenses. Since its introduction in 2007, ROS has grown to become the de facto OS for roboticists all over the world.
Availability
ROS for Qualcomm Snapdragon 600 processors will be available on the Linux OS and is anticipated to be available in Q4 2014 and on the Android OS in the first half of 2015. For more information on Qualcomm Snapdragon processors, please visit, https://www.qualcomm.com/#/products/snapdragon
About The Open Source Robotics Foundation
The Open Source Robotics Foundation (OSRF) is an independent non-profit organization founded by members of the global robotics community. The mission of OSRF is to support the development, distribution, and adoption of open source software for use in robotics research, education, and product development. More information on OSRF is available at www.osrfoundation.org or by following the company on Twitter @OSRFoundation
Media Contacts:
Tim Smith
Element Public Relations
tsmith@elementpr.com
415-350-3019
Qualcomm and Snapdragon are trademarks of Qualcomm Incorporated, registered in the United States and other countries. All Qualcomm Incorporated trademarks are used with permission.
We have an update from NASA’s Johnson Space Center (JSC): ROS is now up and running on Robonaut 2 (R2) aboard the International Space Station (ISS).

ROS was delivered to ISS aboard a SpaceX rocket as part of a recent resupply mission that also included a set of robotic legs that will be attached to R2 soon.
NASA was able to upgrade the R2 torso earlier this month after on-orbit surgery to remove old processors and electronics and install new ones. On August 12, R2 powered up using ROS for the first time.
As we mentioned in a prior post, the R2 team at JSC has been using ROS for R2 development on Earth for the last couple of years. They combine ROS with OROCOS RTT to produce a flexible development environment with real-time capabilities.
Allison Thackston and Julia Badger from the R2 team will be addressing the audience at ROSCon on the unique challenges of deploying software in space systems. Their presentation, “ROS in Space,” will open the second day of the conference. ROSCon takes place on September 12 and 13 in Chicago, IL. For more information and registration details, visit the ROSCon website.


Alex is a robotics engineering intern at OSRF, where he is focusing on Gazebo compatibility for the FIRST Robotics Competition (FRC), with the goal of students to practice programming and test programs with simulation. He is currently completing her BA in Robotics Engineering at the Worcester Polytechnic Institute (WPI). Before coming to OSRF, Alex spent two internships at WPI, where he developed libraries and tools for FRC robots and helping develop WPILIb and RobotBuilder. Alex also volunteers at FRC competitions helping high school students compete.

Gabrielle Merritt is an embedded engineering intern at OSRF, focusing on designing, developing, prototyping, and writing firmware for a microcontroller PCB for Right Hand Robotics. Before she joined OSRF, Gabrielle graduated from the University of Pennsylvania School of Engineering and Applied Sciences with a BSE in Mechanical Engineering and Applied Mechanics. As an undergraduate, Gabrielle was a member of the Modular Robotics Lab, where she help design and develop electronic systems for various modular robots. Gabrielle will be pursuing a Masters of Robotics at UPenn in the fall.

Heather is currently at Olin College working on her BS in Engineering, focusing on computer engineering and robotics. She is working on the Cloudsim team.